 biuro@elektrobim.pl
biuro@elektrobim.pl 91 817 14 69
91 817 14 69





Odkąd na naszym kanale YT pojawił się film, w którym Konrad demonstruje, jak zautomatyzował schody na strych za pomocą naszych siłowników elektrycznych, nie przestajecie o to pytać. Nawet fajnie, że jest takie zainteresowanie tematem. Jednak w naszym zamiarze nie było – i nadal nie ma – sprzedawania gotowych kompletów do takich schodów 😊
Niemniej jednak ponieważ temat ciągle się przewija w rozmowach telefonicznych, postanowiłem napisać kilka słów na ten temat. Wyjaśnię, jak można najprostszym sposobem uzyskać sekwencyjny ruch dwóch siłowników. Może się to przydać nie tylko do schodów automatycznych, ale także np. do wysuwania projektora lub telewizora z ukrycia, gdzie najpierw musi się jakaś klapka otworzyć, żeby potem go wysunąć.
Zapraszam do lektury 😊
Automatyczne schody – zasada działania
Filmik, o którym mowa we wstępie, można obejrzeć poniżej – jeśli jeszcze go nie widziałeś 😉
Automatyczne działanie takich schodów sprowadza się do sekwencyjnego uruchomienia dwóch siłowników: pierwszy ma otworzyć klapę, a drugi rozkłada drabinkę. Ich działanie musi być skoordynowane. Drabinka nie może się zacząć rozkładać, kiedy klapa nie jest otwarta w wystarczającym stopniu. Natomiast klapa nie może się zamykać, gdy drabinka jeszcze jest rozłożona.
Konrad zastosował w swoim projekcie sterownik ETM-DG2 i wykorzystał funkcję opóźnienia startu jednego siłownika za drugim. I jak widać da się to zrobić, ale wymaga to odpowiedniego montażu mechanicznego siłowników. Chodzi o to, że opóźnienie w centrali można regulować tylko do maksymalnie 10 sekund. Jeśli pierwszy startujący siłownik nie zdąży w tym czasie wykonać swojej pracy, bo montaż mechaniczny wymaga pracy z dłuższym wysuwem, to może dochodzić do blokowania systemu, gdy drugi siłownik wystartuje zbyt wcześnie.
Dlatego właśnie wymyśliliśmy prościutki układ, który pozwala się uniezależnić od prędkości pracy poszczególnych siłowników. Dodatkowo układ umożliwia sekwencyjne ich uruchamianie w odpowiedniej kolejności.
Schemat układu sterującego
Żeby zmusić dwa siłowniki do sekwencyjnej pracy wystarczy zbudować banalnie prosty układ z użyciem dwóch krańcówek i diod prostowniczych. Przedstawia to poniższy schemat:
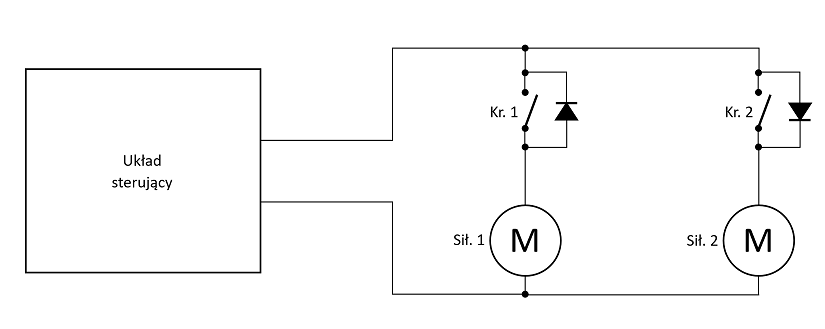
Najistotniejsze w tym wszystkim jest MECHANICZNE ułożenie tych elementów wobec siebie. Mam tu na myśli krańcówki i siłowniki. Już śpieszę z wytłumaczeniem 😊
Chodzi o to, żeby podczas otwierania schodów praca siłownika rozkładającego drabinkę była zablokowana do momentu, kiedy siłownik otwierający klapę nie otworzy jej w pełni. Przy zamykaniu schodów sytuacja jest odwrotna. Praca siłownika zamykającego klapę ma być zablokowana do momentu, gdy siłownik składający drabinkę nie złoży jej całkowicie.
I właśnie od tego są widoczne na schemacie krańcówki z diodami. Mają za zadanie blokowanie ruchu siłowników, dopóki każdy z nich nie wykona odpowiednio swojej pracy.
Ale dlaczego napisałem o mechanicznym ustawieniu, skoro mowa cały czas o elektryce? Wytłumaczy to poniższy rysunek schematyczny:
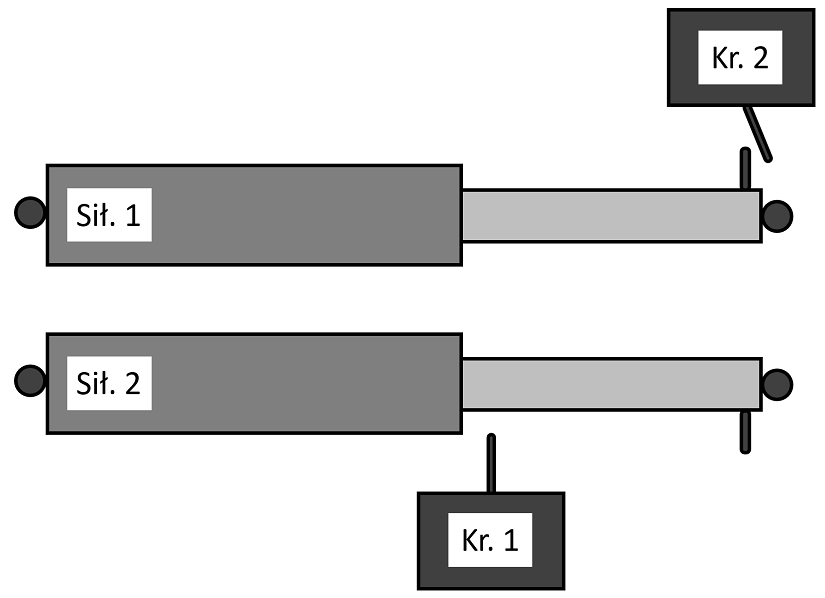
Jak widać, elementy układu mechanicznie są sprzęgnięte ze sobą „na krzyż”, gdyby spojrzeć znowu na schemat połączeń elektrycznych. Podczas otwierania schodów Siłownik 1 na wysunięciu wciska krańcówkę blokującą Siłownik 2 i dopiero wtedy umożliwia jego ruch (wysuwanie). Natomiast podczas zamykania schodów, ruch Siłownika 1 w przeciwnym kierunku (wsuwanie) będzie możliwy dopiero wtedy, gdy tłok Siłownika 2 będzie odpowiednio schowany.
Uzyskujemy w ten sposób to, co opisałem wcześniej. Podczas otwierania schodów drabinka rozkładana Siłownikiem 2 nie zacznie się rozkładać zanim Siłownik 1 nie otworzy klapy w wystarczającym stopniu. Natomiast przy zamykaniu schodów klapa zamykana Siłownikiem 1 nie zacznie się zamykać, zanim Siłownik 2 nie zdąży złożyć drabinki.
Jaki sterownik użyć?
W przypadku wymuszenia sekwencyjnej pracy dwóch siłowników w opisany wyżej sposób (krańcówki + diody) nie ma konieczności stosowania skomplikowanych central sterujących bramami.
W takim układzie wystarczy w zupełności prostsze sterowanie prawo/lewo, np. dwukanałowy sterownik RC-2K PRO.
Warto też pomyśleć o wyposażeniu układu w moduł przeciążeniowy, na wypadek, gdyby schody napotkały opór. W tej roli świetnie się sprawdzi moduł PP-30.
Do kompletu należy jeszcze tylko dołożyć odpowiedni zasilacz, który będzie pasował pod względem napięcia wyjściowego oraz wydajności prądowej do siłowników.
No i oczywiście diody i krańcówki: muszą być w stanie wytrzymać prąd pobierany przez zastosowane siłowniki. I lepiej przesadzić w taki sposób, że użyjemy mocniejszych w stosunku do potrzeb, niż za słabych 😊. W naszej ofercie są krańcówki z diodami o prądzie do 5A, które w zupełności wystarczą do popularnych siłowników FDI najczęściej stosowanych w tego typu konstrukcjach.
Podsumowanie
Automatyczne schody to całkiem fajny pomysł. No i realizacja go wcale nie musi być bardzo trudna. Co prawda siłowniki trzeba dobrać odpowiednio do posiadanych schodów. Konieczne jest uwzględnienie ich ciężaru i wagi (trzeba zrobić odpowiednie obliczenia). Niemniej sam zaprezentowany układ sterujący jest już uniwersalny i bardzo prosty. Znika też trudność takiego zestrojenia mechaniki układu, żeby opóźnienie 10 sekund dostępne w centrali ETM-DG2 mogło być wystarczające. Nawet jeśli potrzeba więcej czasu na wykonanie pracy przez każdy z siłowników, aby mógł wystartować kolejny z nich, to nie musimy się tym przejmować. Wszystko zadzieje się samo 😊
Mam nadzieję, że pomogłem 😊




